
原装畅销·品牌齐全·海量型号·库存充足
联系我们
Contact us
深圳京柏微科技有限公司

什么是编码器-什么是机器人关节模组-麦歌恩离轴磁编器MT6728 MT6620 MT6709案例分享
磁编码器芯片常用于测量机器人、电机等设备的旋转运动。那么什么是离轴编码器呢?
离轴式磁编码器采用多磁对极码盘,芯片安装位置偏离旋转轴中心。在运行过程中,每一对极都会产生一个周期的正余弦信号,并通过硬件内插器转换成正交或者串行位置信号。当电机轴旋转起来后,芯片内部霍尔元件在径向范围内感应到的磁场强度保持不变,电机轴的径向抖动(只要在霍尔感应磁场的径向范围内)也不会影响霍尔感应输出信号的精准度。因此,只要在实际安装过程中确保芯片位置和径向安装距离(跟磁对极距有关),就能确保输出信号的准确性。

(一)拆解编码器增量市场:人形机器人
1、人形机器人:单特斯拉 Optimus 编码器需求量 50+,价值量约为 7500 元
这一节,我们不赘述人形机器人产业化落地中持续降本,带给国产供应商巨大机会的逻 辑,主要对直线执行模组、旋转执行模组和灵巧手所需的编码器进行拆解。 特斯拉 BOT 运动控制模块主要分为直线执行模组、旋转执行模组和灵巧手。旋转执行模 组包括无框力矩电机、谐波减速器、双编码器、力矩传感器以及轴承,赋予 BOT 精准的 旋转控制能力。直线执行模组包括无框力矩电机、行星滚柱丝杠、编码器、力传感器以 及轴承,这些零部件相互协作,使 BOT 能够实现精准的运动。灵巧手使用的空心杯电机 模组则由空心杯电机、减速器和编码器构成,从而使得 BOT 手部能够实现高度敏感和灵 活的运动,为实现复杂的抓取和操作任务提供了坚实的基础。
单 BOT 直线、旋转执行模组各为 14 个。旋转执行模组主要由手臂、腿部和躯干构成, 覆盖肩、肘、髋、腰关节;直线执行模组由手臂和腿部构成,覆盖腕、肘、髋、膝、踝关 节。每个单独的 BOT 都由 14 个直线执行模组和 14 个旋转执行模组组成,构成了其精密 而高效的运动控制系统。这些执行模组通过精确的位置和角度控制,使机器人能够实现 多样化的动作和姿态。模组的协同工作,为 BOT 带来了出色的机动性和操作灵活性,使 其能够应对各种复杂的环境和任务要求。
编码器用于测量关节角度和位置,确保 BOT 的运动精度和稳定性。特斯拉 BOT 需要实 现高度精准的运动控制,以模拟人类的动作。通过实时监测编码器反馈信息,BOT 可以 准确地控制肢体的运动,实现平稳的步态和灵活的动作。旋转执行模组采用双编码器主 要包含电机侧的编码器和减速器输出端的编码器,两个编码器可以增加系统的动态响应, 提高系统带宽,缩短响应时间。
单 BOT 编码器价值量约为 7500 元。根据特斯拉 AI Day 发布会展示的解决方案,每个旋 转执行模组具备独立的输出和输入两个编码器,而每个直线执行模组则配置了一个编码 器;在灵巧手模块中,为满足其复杂功能需求,每个空心杯电机模组均搭载了一个编码 器,总计单 BOT 需要 54 个编码器;结合国产厂商定价,我们假定执行模组所使用编码 器的价格为 150 元/个,空心杯电机模组所使用的编码器价格为 100 元/个,经过测算,单 BOT 的编码器价值量约为 7500 元。
特斯拉 Optimus 产业化进展加速,赋能编码器浩瀚市场。2023 年特斯拉股东大会上马斯 克表示,“未来每个人都会拥有一个人形机器人,如果人形机器人和人的比例是 2 比 1 左 右,那么人们对机器人的需求量可能是 100 亿乃至 200 亿个”;参考马斯克公开言论,我 们假设 2025 年 Optimus 目标交付量按悲观、中性、乐观情况,分别达到 10 万台/50 万台 /100 万台,根据上文的价值量测算,有望为编码器带来 70 亿元的新增市场空间。
(二)离轴磁编案例分享 - 机器人关机模组
六轴协作机器人产品

机器人关节模组:

机器人关节模组内部结构:

机器人关节模组八大核心:
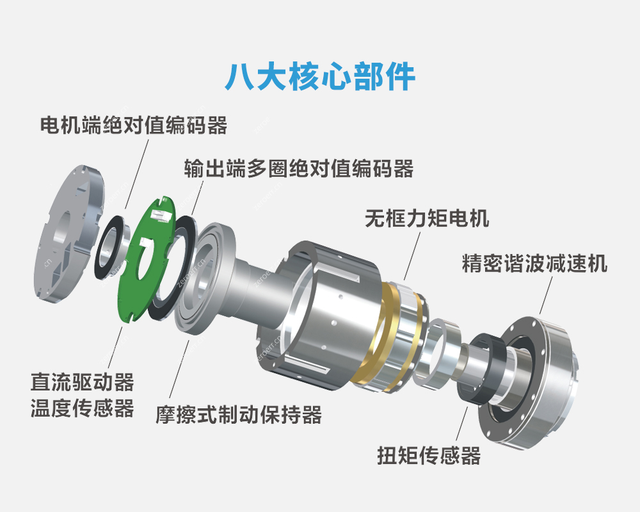
1.电机端绝对值编码器
用于采用关节速度,放置在电机末端,采集电机的速度。
2.输出端多圈绝对值编码器
20位绝对值编码器,重复定位精度高达±7角秒,绝对定位精度高达±15角秒,可记忆单圈及多圈断电位置,全闭环控制,无磨损精度。
3. 无框力矩电机
提供出色的扭矩密度,从而实现紧凑的占地面积,减少空间和重量。
4.精密谐波减速机:
50减速比、80减速比、100减速比、120减速比,多款按需选择。
5.直流驱动器
改变电机电压控制无刷直流速度。
6.温度传感器
能感受温度能够转换成可用输出信号的传感器。
7.摩擦式制动保持器
采用摩擦式制动器,停机无晃动,开机无抖动。可实现满负载零速启动。运行无磨粉,转动无噪音,耐受100%全速重载急停。
8.扭矩传感器:
测量各种扭矩、转速及机械功率的精密测量设备。
(三) 机器人关节模组的设计要求:
- 客户需求: 需要离轴,优点:可以中空走线,方便线缆从机器人中间穿过去,可以更好得保护好线缆,不需要把线漏在外面,影响使用和产品寿命。目前iC-Haus的离轴芯片价格很贵,阻碍了大批量应用。
- 关节模组单机用量:2个。6轴协作机器人用量:2X6=12个。(也有单个关节模组用1个的)
- 对手型号1:iC-MHL200, iC-Haus, 离轴,价格贵
- 对手型号2:英飞凌TLE5012,在轴。(通过增加机械结构,用在轴实现离轴效果。缺点:噪音大。)
- 麦歌恩型号:
- MT6620
- MT6728
MT6709

(四)Magntek麦歌恩离轴编码器MT6709/MT6620/MT6782芯片介绍:
1)MT6728高分辨率、高精度解码细分IC

特性和优势
支持外部差分Sin、Cos模拟信号输入,信号频率最高支持到32KHz
支持客户端简洁自校准,无需对外数据交互,无特殊运转要求
解码后的角度数据,可同时支持增量ABZ、增量UVW、PWM以及3线SPI绝对值接口输出
21位核心角度分辨率
匀速系统延时<2us
增量ABZ输出支持1~16,384脉冲/周期,任意整数分辨率客户可编程
增量UVW输出支持1~63对极任意整数对极可编程3.3~5.0V、-40~125°C 温度范围内均可工作内置3.0~5.5V用户可编程EEPROM,无需外挂
2)MT6709:离轴绝对值角度检测解码芯片 (外置线性霍尔)
MT6709是麦歌恩微电子推出的新一代针对外部线性霍尔(配合1对极磁环工作)输入的正、余弦模拟信号进行角度计算的解码芯片。随着转动轴带动单对极磁环(一个N极、一个S级)转动在磁环四周互成90°摆放的四颗线性霍尔芯片会感应输出正、余弦的模拟信号,MT6709对这四路差分正、余弦模拟输入信号进行补偿、计算、解码之后,可以得到分辨率为17位的绝对角度数据;角度数据会被进一步编码成最高分辨率为2.500脉冲/周期或者是10000步/周期的AB增量信号;MT6709也提供了UVW输出,分辨率支持1~63对极/周期。
特性和优势
解码配合单对极磁环工作的互成90°摆放的4颗线性霍尔使用,将正余弦模拟信号解码成绝对角度数据,可实现离轴的(Off-Axis) 0~360°绝对角度检测
内部17位绝对角度数据可通过SPI接口读取
可同时支持增量ABZ、UVW、PWM以及3线SPI绝对值接口输出
增量ABZ输出支持1~2,500脉冲/周期,任意整数分辨率用户可编程,UVW输出支持1~63对极,任意整数对极用户可编程
零点位置可通过专用中断脚一键编程、无需数据交互
系统延时 (匀速时)<2us
3.3~5.0V、-40~125°C 温度范围内均可工作
内置3.0~5.5V用户可编程EEPROM
3)MT6620:基于霍尔阵列开发的支持离轴角度和位置检测的集成式传感器芯片
特性和优势
基于2mm固定极距的霍尔感应阵列,实现可离轴安装的角度和位移检测
提供客户端的简洁自校准模式,无数据交互、自动计算补偿
-40~125℃温度范围内均可工作
可同时支持增量ABZ、增量UVW、PWM绝对值和3线SPI总线输出
增量ABZ输出支持1~2.500脉冲/对极,任意整数分辨率客户可编程
增量UVW输出支持1对极~63对极任意整数对极客户可编程
内置3.3V~5.0V可编程的EEPROM
